Research on structureless pose estimation
The global approaches solve SfM problems by independently inferring relative motions, followed by a sequential estimation of global rotations and translations. This approach is fast but not optimal because it relies only on pairs and triplets of images and it is not a joint optimisation. In this publication, we present a methodology that increases the quality of global solutions without the usual computational burden tied to the bundle adjustment. We propose an efficient structure approximation approach that relies on relative motions known upfront. Using the approximated structure, we are capable of refining the initial poses at very low computational cost. Compared to different benchmark datasets and solutions, our approach improves the processing times while maintaining good accuracy.
Regardez la version anglaise
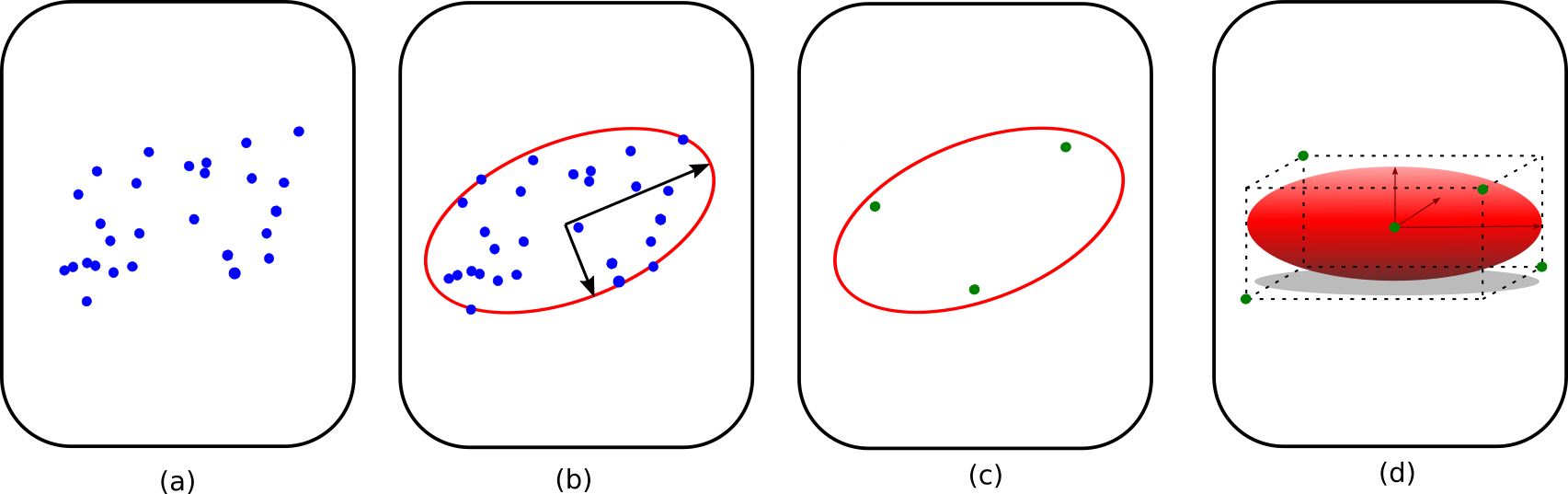
Algorithm
Toy example of the pipeline
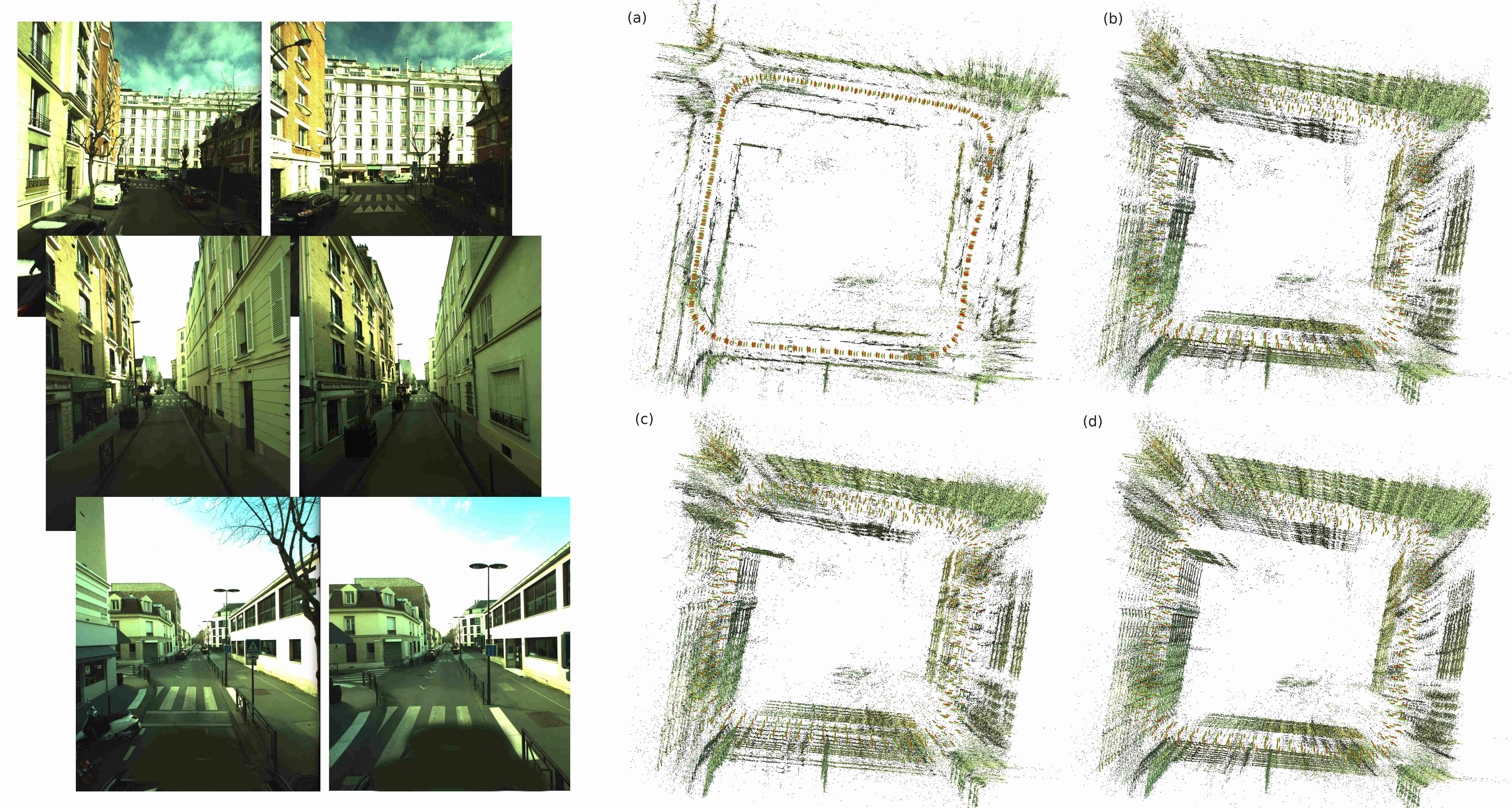
Results
Comparison between GT, sequential SfM and and various approximation variants.